-

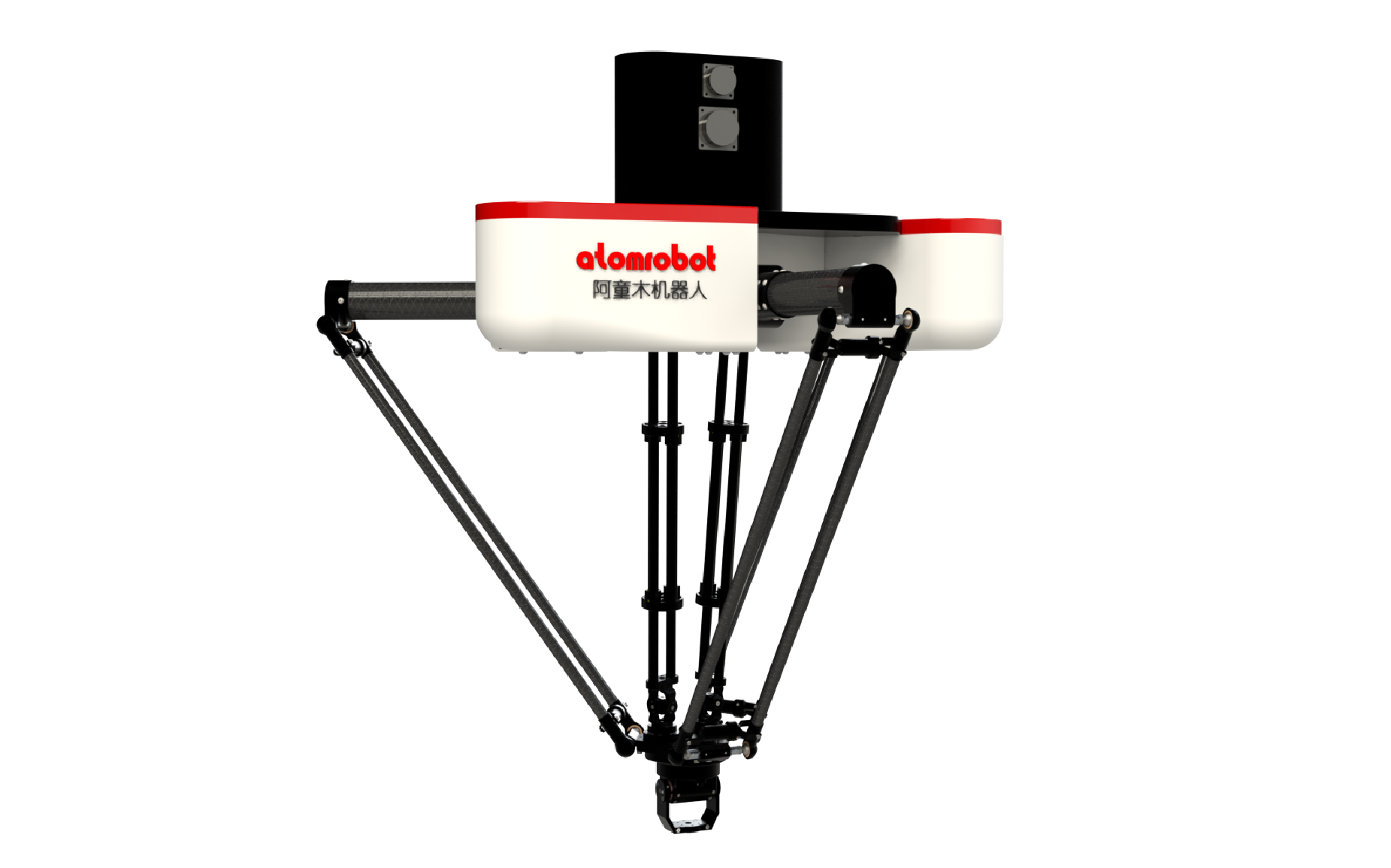
D3PMZ-1100-P3
经典高速并联机器人的构型,具有沿三维空间XYZ轴平动和绕Z轴旋转的功能特点,通过搭配高精度机器视觉系统,适于食品、医药等行业的高速生产作业,主要用于轻小散乱物料的装配、搬运、分拣等。
工作空间:1100mm 最大负载:3kg 轴数:4 最高运动频次:540pp/min -

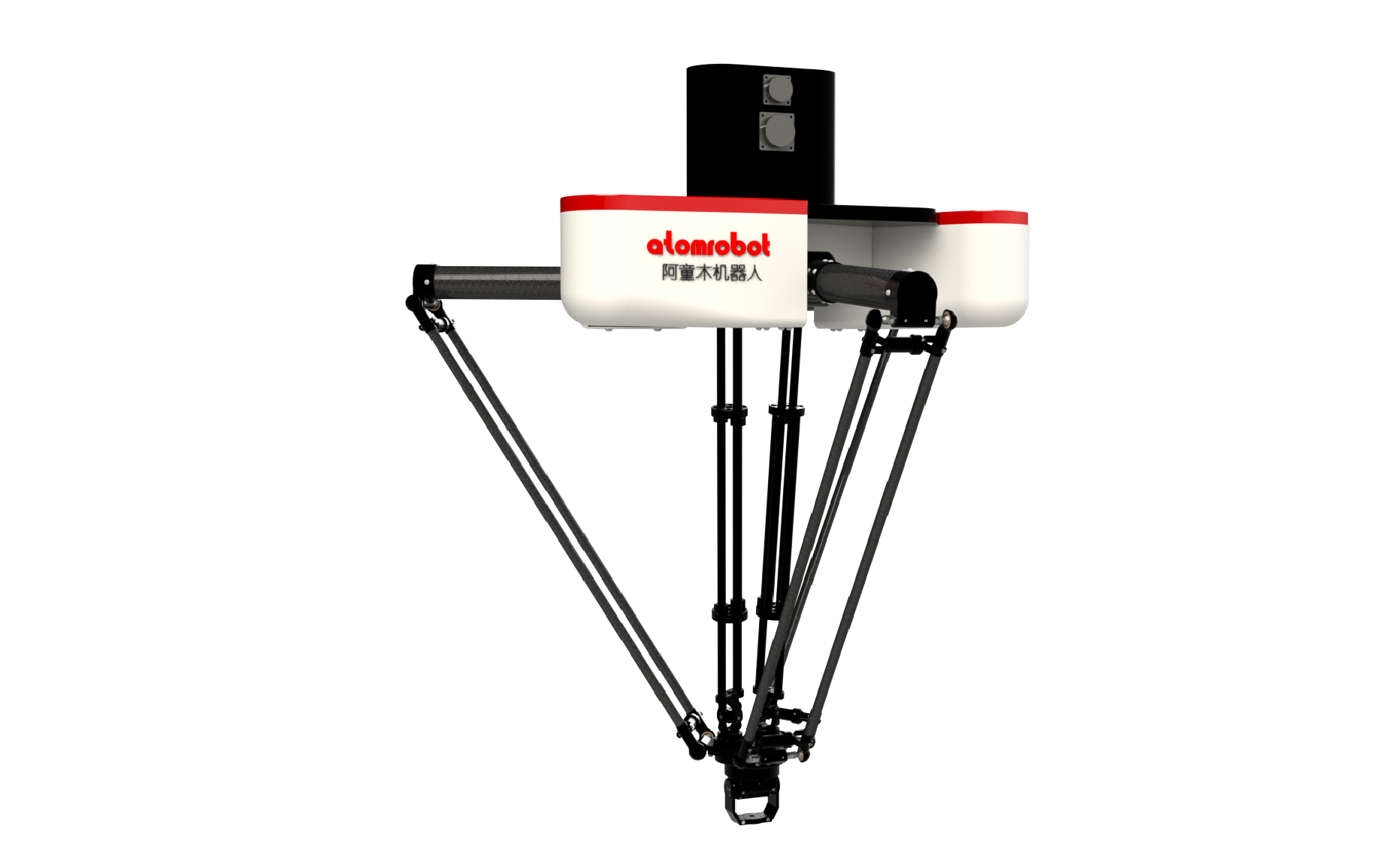
D3PMZ-1300-P3
经典高速并联机器人的构型,具有沿三维空间XYZ轴平动和绕Z轴旋转的功能特点,通过搭配高精度机器视觉系统,适于食品、医药等行业的高速生产作业,主要用于轻小散乱物料的装配、搬运、分拣等。
工作空间:1300mm 最大负载:3kg 轴数:4 最高运动频次:450pp/min -
D3PMZ-1400-P3
经典高速并联机器人的构型,具有沿三维空间XYZ轴平动和绕Z轴旋转的功能特点,通过搭配高精度机器视觉系统,适于食品、医药等行业的高速生产作业,主要用于轻小散乱物料的装配、搬运、分拣等。
工作空间:1400mm 最大负载:3kg 轴数:4 最高运动频次:430pp/min -
D3PMZ-1600-P3
经典高速并联机器人的构型,具有沿三维空间XYZ轴平动和绕Z轴旋转的功能特点,通过搭配高精度机器视觉系统,适于食品、医药等行业的高速生产作业,主要用于轻小散乱物料的装配、搬运、分拣等。
工作空间:1600mm 最大负载:3kg 轴数:4 最高运动频次:400pp/min -
D5-800-P2
5轴机器人在传统三轴并联机器人基础上,增加两根平行旋转轴,通过一轴控制水平转动,另一轴控制垂直方向旋转;两中间轴采用伺服耦合控制,具备更高的精度,更快的速度,更长的使用寿命。
工作空间:800mm 最大负载:2kg 轴数:3+2 最高运动频次:400pp/min -
D5-1200-P2
5轴机器人在传统三轴并联机器人基础上,增加两根平行旋转轴,通过一轴控制水平转动,另一轴控制垂直方向旋转;两中间轴采用伺服耦合控制,具备更高的精度,更快的速度,更长的使用寿命。
工作空间:1200mm 最大负载:2kg 轴数:3+2 最高运动频次:380pp/min -
D5-P-1600-P25
5轴机器人在传统三轴并联机器人基础上,增加两根平行旋转轴,通过一轴控制水平转动,另一轴控制垂直方向旋转;两中间轴采用伺服耦合控制,具备更高的精度,更快的速度,更长的使用寿命。
工作空间:1600mm 最大负载:25kg 轴数:3+2 最高运动频次:180pp/min -

AM-BL03
一款集成了Delta机器人、工业摄像头和电脑软件的一体化智能机器人工作站,能够 智能识别细小零件,然后通过高速精准的机械手臂把零件摆放整齐,无论零件正反 面,都能一眼看清,一手搞定
工作空间:300mm 最大负载:1kg 轴数:3 最高运动频次:180pp/min -

AM-BL03-FP
一款集成了Delta机器人、工业摄像头和电脑软件的一体化智能机器人工作站,能够 智能识别细小零件,然后通过高速精准的机械手臂把零件摆放整齐,无论零件正反 面,都能一眼看清,一手搞定
工作空间:300mm 最大负载:1kg 轴数:3 最高运动频次:180pp/min


