

-
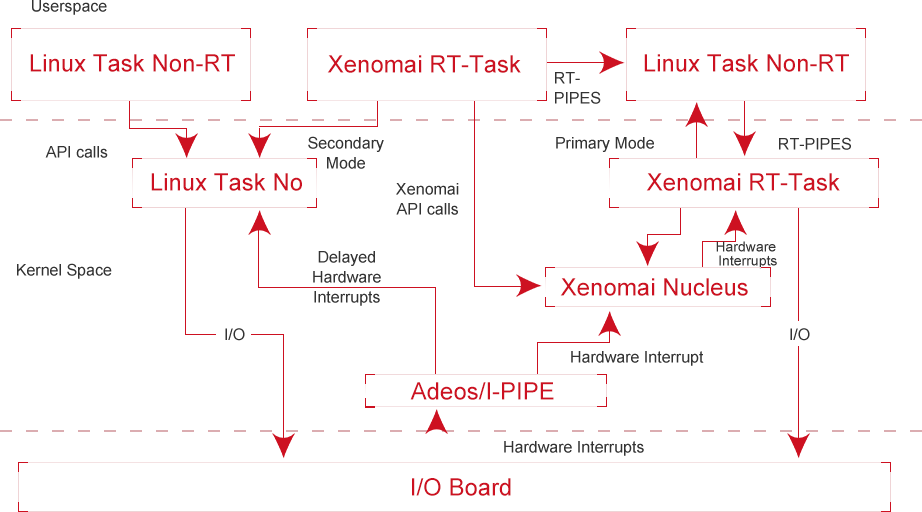

基于Linux+Xenomai实时环境搭建
采用双内核机制的Linux内核的强实时扩展。为开发强实时性应用提供了丰富的功能,为机器人运动规划提供了可靠的运行环境。阿童木机器人控制系统基于ROS+OROCOS平台开发,是国内唯一并联机器人专用的控制系统。
-


基于ROS+OROCOS平台控制系统
在ROS平台基础上,机器人控制系统综合事件驱动架构和分层架构,进行机器人控制和操作应用处理的模块,如视觉系统,机器人运动控制中枢,人机交互界面等之间使用ROS的topic和service进行通讯,模块的部署和交互耦合度低,易于开发和维护。同理,ROS则是对机器人的硬件进行了封装,不同的机器人、不同的传感器,在ROS里可以用相同的方式表示(topic等),供上层应用程序(运动规划等)调用。
-
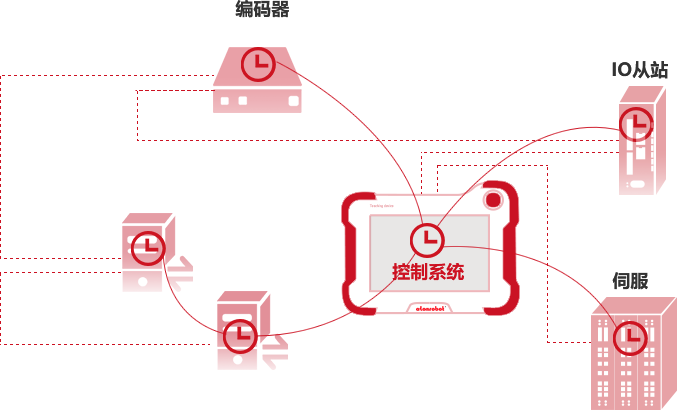

基于Acontis的Ethercat通讯主栈
基于以太网的开发构架的实时工业现场总线通讯协议,是最快的工业以太网技术之一,提供纳秒级精确同步。具有高性能、拓扑结构灵活、应用容易、低成本、高精度设备同步等特点。
核心技术
-


多机器人
模型支持.jpg)
除2轴、3轴、3+1等经典并联构型外,还支持5轴、6轴串并混联机型以及stewart平台。
-


复杂轨迹
记忆.jpg)
通过样条曲线拟合轨迹,可实现复杂示教轨迹的记忆跟踪。
-


速度前瞻
.jpg)
通过速度前瞻技术,获取更平滑的速度曲线,在加速度变化频繁的场合仍然可以得到平滑的速度曲线,提高机器人运行效率。
-


拖动示教
.jpg)
通过直接手持牵引机器人,记录示教过程的位姿数据,以直观方式对机器人应用任务进行示教。
-


主动抑振
.jpg)
通过抑振算法有效减小机器人在高速骤停时引起的机械震荡,提高机器人高速运行下的定位精度。
-


外部轴联动

除本体之外,还可控制多个外部伺服轴进行独立或与机器人同步的多轴联动。
-


动态跟踪
.jpg)
在机器人视觉或编码器的加持下,可对沿直线、圆弧运行物体的实现随动抓放。
-


码垛功能
.jpg)
提供码垛算法,输入码垛构型即可自动生成运动轨迹提高效率。
-


物联网植入
.jpg)
连接物联网模块,通过手机即可远程观察设备当前运行状态。
-


SoftPLC

Soft PLC是除了通过在Hmi界面输入命令之外,与用户交互的另外一个接口。用户通过Soft PLC可以进行PLC编程,管理和控制控制器上连接的IO。
-


圆盘追踪
.jpg)
通过视觉获取物体信息,并通过机械手与圆盘传送带建立运动关系,实时追踪圆盘上物体的运动轨迹。
-


区域监控
.jpg)
通过设定工作区域与禁止区域免发生碰撞等意外情况控制系统会实时监控机器人的工作空间,通过监控区域的关系来控制机械手的启停。
视觉系统
AtomVision提供高效的物体识别定位功能,包含多种目标识别算法,为机器人运动提供精确的目标位置。内含多种实用工具,方便设置和调试,并为调试人员提供友好的操作界面,目前已广泛应用于多种实际项目中。
01 01
跨平台视觉系统
支持windows/linux的跨平台应用,可实现在不同平台上的视觉应用部署。
02 02
多种目标识别算法
支持Blob、模板匹配、字符二维码识别,工件定位等多种检测手段。
颜色提取

颜色提取
视觉标定

视觉标定
blob分析

Blob分析
边缘匹配

边缘匹配
测量工具

测量工具
二维码
识别

二维码识别
模板匹配

模板匹配
条形码
识别
条形码识别
圆查找

圆查找

03 03
简单快捷的用户交互界面操作
针对用户习惯、开发灰度、物体流程的快捷操作界面。同时提供相机夹角、计算像素比、9点示教,多客户端/服务器支持等方面用户操作的功能。

